上接「虎年談天下大勢:彈道導彈攻擊大型海面船隻(IV)」
(十一)雷達的操作模式
雷達因需要的不同在操作上有許多不同的模式(mode),花樣繁多,但是最基本的有三個模式:
1. 搜尋與發現;
2. 邊搜尋邊追蹤;
3. 單目標追蹤。
當然,最現代的雷達還有一種非常有用的模式叫做地面成像(ground mapping mode),其中解析度最高的一種叫做「合成孔徑雷達」(Synthetic Aperture Radar,簡稱 SAR)。
我們把重點放在最基本的三個模式,它們是每個雷達都具有的模式。
甲. 雷達的搜尋、發現與追蹤
A. 搜尋(Search)
雷達搜尋空中或海面的目標,就跟你在黑暗中用手電筒尋找空中的蚊子或地上的一根針是完全一樣的。
如果是搜尋空中目標,先決定搜尋範圍,譬如左右60度和上下30度,於是先把這個範圍正前方的水平方位和高低方位以雷達波束寬為單位劃成格子,然後依照順序一格一格的掃瞄,譬如從左上方開始水平向右掃瞄,掃瞄一列以後,雷達天線在高低方向下降一個波束寬,然後向左掃瞄,到了左邊的邊界角度,天線再下降一個波束寬,然後向右掃描,...,如此這般直到所有格子都掃描完畢。然後又從左上方重新開始掃描。
對海或對地的搜尋也是一樣,先決定搜尋範圍,譬如左右60度,於是先把這個範圍的海面或地面以雷達波束寬為單位劃成格子,然後以雷達波束寬為單位依照一定的順序一排一排地掃瞄。
這就是雷達的搜尋工作。
B. 發現(Detection)
任何一個“格子”當雷達波束照射的時候,雷達的接收器(radar receiver)就開始處理從這個“格子”接收到的訊號,經過整合後就得出一個速度與距離的方陣,每一個方陣單元都有距離、速度、功率(power)...等等資料。
雷達工程師設計好一個目標取捨的數值標準(這個數值的設定是有學問的,此處不深入討論)。
任何方陣單元如果探測到的功率(power)超過這個數值就是目標,也就是說,一個目標被發現了,雷達裏面的電腦就會通知操作員(譬如發出嗶嗶聲)並且把它的相關資料顯示在雷達屏幕上。
任何方陣單元如果探測到的功率低於這個數值,電腦就拋棄它,當作什麼也沒看見。
這就是雷達的發現工作。
注意,雷達雖然發現了目標,只是把這個目標的相關資料告訴操作員而已,雷達的搜尋工作仍然繼續照常進行,完全不受影響。至於雷達操作員看到這個目標後有什麼進一步的決定,那是操作員的事,操作員自有一套他自己的標準決定這個目標重不重要。
C. 追蹤(Track)
如果操作員覺得某一個被發現的目標很重要,譬如目標接近到某個程度、目標速度特快、目標回波特大等等,操作員便會按下一個鈕決定追蹤它,於是雷達便進入追蹤的模式。
追蹤的模式有兩種,一種是「單目標追蹤」(single target track,簡稱 STT),另一種是「邊搜尋邊追蹤」(track while scan,簡稱 TWS)。通常是先進行「邊搜尋邊追蹤」,最後可能選定一個做「單目標追蹤」。
相對於搜尋,追蹤模式的過程要複雜非常多。當一個目標被選定追蹤,雷達裏面的電腦就為它特別設立了一個資料夾(file)並且編號,資料夾裏面儲存這個目標所有的相關資料。所以每一個被發現的目標都有自己的編號和資料夾。
雷達進入追蹤模式的時候會設定一個觀察的週期,也就是每隔多久會觀察它一次,這個週期是系統工程師選定的,通常短於雷達的掃瞄周期,譬如掃描一次是兩分鐘,被追蹤的目標有可能每20秒就要觀察一次,避免它逃脫。當下次觀察的時間到了,雷達會把天線轉到這個目標預測會出現的方位來確定它還在不在。這個過程說來輕鬆,其實非常複雜,裏面包含很大的學問。
雷達追蹤困難的焦點就在:你怎麼知道下次看到的目標就是這個目標?
所以雷達追蹤技巧的精髓是:雷達軟體不但必須預測這個目標下次應該在什麼地方出現而且必須給出誤差不能大於某個數字。
好了,雷達每次觀測同一個目標時不外乎下面三種情形:
1. 如果雷達看到一個目標並且在預測的範圍內,雷達就在資料夾填上它的新位置,但是同時保留它的舊位置。理論上,過去觀察的位置越多,預測未來的位置也就會越準,一般而言,系統工程師會決定要保留多少個舊位置作為預測下一個位置的基礎;
2. 如果雷達什麼目標都沒有看到,雷達就在資料夾上填寫目標消失,並且查看連續消逝了幾次。如果次數不到N就決定繼續觀察並且預測下次它應該在什麼地方出現;如果連續消逝的次數達到N,那麼雷達的電腦就認為這個目標已經永久消逝了,於是把它的資料夾刪除、編號也取消;
3. 如果雷達看到一個目標,但是它不在這個目標預測出現的範圍內,電腦也把這個目標當作情況2處理,但是把探測到的目標當成一個新目標,另外設立一個資料夾(file)並且編號。
這就是雷達追蹤的過程。
D. 幾點評論
論述到了這裏,有幾個非常重要的觀點讀者需要瞭解,所以我們有必要提出進一步的說明。
1. 追蹤數目
讀者在閱讀軍事文章中常常會看到這樣的敘述:某型戰鬥機的火控雷達可以同時追蹤20個目標並且選擇其中的六個目標進行攻擊。
這是甚麼意思呢?
在上面我們論述雷達的追蹤過程中提到每一個追蹤的目標都有一個編了號碼的資料夾,裏面儲藏所有有關這個目標過去的追蹤資料和預測下一次觀察時它的位置與容許的誤差,這裏面牽涉的學問叫做「估計理論」(estimation theory),這個估計過程中有一段過濾雜音的手續通常採用一種技巧叫做「卡曼濾波」(Kalman filter),它的計算非常複雜,不是一件簡單的事,即使是高速電腦也非常耗費時間。
任何電腦的中央處理器(CPU)的計算能力是有限的。雷達操作所需要的計算很多,通常有一些固定的事情(house keeping work)必須先處理,剩下的時間才能分配到各種操作模式(operating mode)的計算。系統工程師把所有的計算工作都依照優先順序加以排列,但是即使最不優先的工作也都必須在某一段時間內完成,這個時間稱之為「模式時間」,它也許是10毫秒(milli-seconds)也許是100毫秒,由系統工程師來設定。
由於追蹤目標每增加一個,計算量就增加很多,系統工程師必須確定所有的計算在規定的時間內能夠全部完成,否則就會出亂子。如果計算的時間不夠,只有兩種解決方法,一是延長「模式時間」,二是限制追蹤的數目。延長「模式時間」就要放慢掃瞄速度,如此一來整個雷達的作業能力就要降低,茲事體大,系統工程師通常不願意。所以剩下的唯一選擇就是限制追蹤的數目了。也就是說,追蹤數目是在掃瞄速度能夠接受的情形下的最佳妥協。
所以我們看得很清楚,任何雷達一旦定型,它能夠追蹤的目標數目是固定的。如果在實際作戰中出現的目標超過這個數目,多出來的這些目標雷達就顧不了了,因為追蹤數目一旦飽和,雷達軟體便不再接受追蹤新的目標。
2. 飽和攻擊
從「追蹤數目」的定義我們就可以看出「飽和攻擊」的理論基礎是甚麼。所謂「飽和攻擊」就是攻擊者的數量超過這個雷達系統能夠處理的目標追蹤的數目,在這種情形下被攻擊者只能聽天由命。
所以追蹤數目是衡量一個雷達優劣的重要指標之一。敵人必須付出大於追蹤數目的攻擊力量才能進行飽和攻擊。
至於同時可以攻擊多少個目標主要是跟攻擊者攜帶的導彈數量有關,這倒不是重點,跟雷達的能力無關,因為通常雷達能夠追蹤的目標數目遠大於戰鬥機攜帶的武器數目。譬如雷達追蹤了20個目標,它會把這20個目標依照威脅程度的大小順序排列出來提供飛行員決定。如果這架戰鬥機只攜帶了兩枚中程空對空導彈,飛行員頂多也只能夠選兩個目標攻擊;如果這架戰鬥機攜帶了20枚中程空對空導彈,那麼飛行員選擇攻擊全部20個目標也不是問題。但是今天的戰鬥機頂多攜帶八枚空對空導彈,其中通常只有一半或頂多六枚是中程的。
軍艦攜帶的導彈數量比飛機多得多,但是早期的軍艦對空導彈是裝設在可以上下和高低轉動的發射架上,一個發射架通常只配置兩枚導彈,它們的發射速度很慢因為發射架的轉動需要時間,發射後重新填裝所需要的時間就更長了,所以軍艦能夠同時攻擊的目標數很低,仍然遠低於雷達追蹤的數目,防禦能力同樣是受限於導彈而不是雷達。
但是最新式的軍艦裝有垂直發射系統,這些導彈都是儲藏在垂直發射井中,不但載彈量很大而且可以隨時處於發射狀態,所以它們的發射的速度非常快。譬如美國“提康德羅加”級導彈巡洋艦(Ticonderoga class guided missile cruiser)攜帶的對空導彈數量為一百二十二枚而且都在垂直發射井中隨時待命,但是神盾雷達系統的追蹤能力是達不到一百個目標的,這時候防禦的能力就限制在雷達了。
3. 追蹤的誤差
「邊搜尋邊追蹤」最大的問題就是天線必須不定時地中斷掃瞄去照射這些被追蹤的目標然後再回到中斷的位置繼續掃瞄。直到現在絕大多數的雷達是機械轉動的,這不但對天線的轉動造成負擔,而且由於有動量(momentum)的緣故在追蹤照射時會造成較大的天線瞄準誤差(antenna pointing error),直接導致追蹤數據的誤差。
相控陣雷達(Phase Array Radar)在「邊搜尋邊追蹤」的模式中它的優越性就立刻顯露出來了。由於它是電子轉動的,瞄準任何方向可以不到千分之一秒完成,而且沒有動量(momentum)的問題,所以具備更迅速與更精確的追蹤能力。
大型地基雷達在七0年代以後開始有相控雷達,機載雷達有相控雷達則是90年代以後的事了。
無論是傳統機械式掃瞄的雷達還是能夠電子掃描的相控陣雷達,它們目標定位的誤差都比雷達波束寬要小很多,我們在下一節(乙)有詳細說明。但是無論是哪一種雷達,最準確的追蹤是「單目標追蹤」,因為它是連續追蹤,在這個模式中天線對目標保持連續照射。
4. 被追蹤的目標如何反應
從被雷達照射的目標而言,搜尋、發現、追蹤、連續追蹤,這些過程的每一個階段目標感覺到遭受威脅的程度是不同的。
如果很長一段時間才被照射一次(譬如每2分鐘一次),目標會很安心,因為它知道自己不過是被搜尋而已,有沒有被發現還不一定,也許有,也許沒有。
如果被照射的頻率增加(譬如每20秒一次),目標就知道自己不但已經被發現了,而且幾乎確定被追蹤,警報器這時候會提出警告。
如果被連續照射,目標就知道自己不但被追蹤而且已經被鎖定(單目標追蹤)。如果電腦根據電波的特性(waveform)判定這是敵人的火控雷達,那麼攻擊導彈可能即將發射或已經發射了,這時候警報器一定會發出強烈警告,因為時間上目標本身已是危在分秒而不是旦夕。目標在這個時候一般會採取猛烈的機動企圖脫鎖(break lock),飛機會進行翻滾,船艦會開啟近程防禦系統並且採取蛇行來躲避攻擊。
乙. 單目標追蹤的原理
上一節,我們說的是目標在雷達搜尋、發現與追蹤下會採取什麼行動。
這一節,我們要深入討論,雷達在「單目標追蹤」的運行下做些什麼。
雷達的作業無論是搜尋、發現或追蹤,只要天線還在不停的掃瞄,測定目標的精確度一般並沒有什麼差異,但是一旦進入「單目標追蹤」(single target track),也就是鎖定,那麼情形就完全不同了。
「單目標追蹤」是非常、非常重要的運作,為什麼?
答案是:當雷達進行「單目標追蹤」的時候,雷達天線不再掃瞄,而是對目標進行持續照射與精確跟蹤。
什麼叫做「精確跟蹤」?
我們先觀看下面的圖形,「精確跟蹤」就非常容易瞭解了。
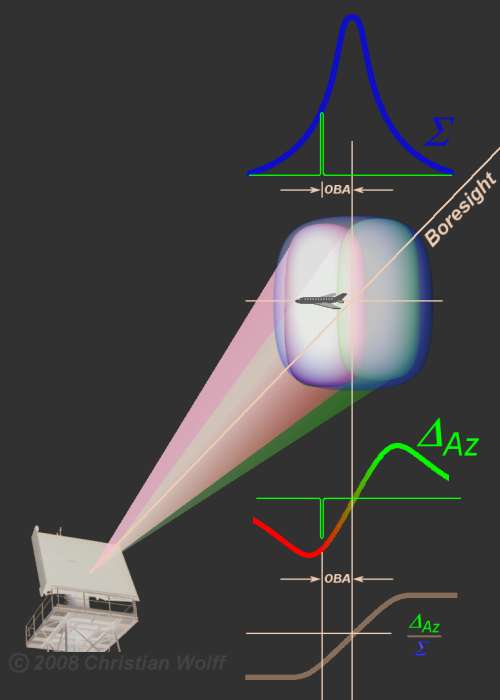
圖09:單脈沖雷達(monopulse radar)的追蹤原理
註:單脈沖雷達的追蹤原理是一個古老的技術,應該是上個世紀50年代以前的發明。
A.單脈沖天線
雷達波的發射每次都是一個很短的電波,時間長度從不到1微秒(micro-second)到幾毫秒(milli-seconds),雷達術語叫「脈沖」(pulse),然後間隔一段時間再發射一個脈沖。如果你看過電影中醫院的開刀房,就會看到實時的心臟跳動的心電圖,雷達波的發射就像脈搏的跳動一樣,故得此名。
單脈沖雷達(monopulse radar)就是一種能夠用一個脈沖(single pulse)就可以修正目標角度誤差的雷達。神奇吧?
雷達能夠做到這一點看似有點不可思議,其實這個能力說穿了並不是什麼高深的學問,中學程度的腦力而已,不值得驚訝。「單脈沖雷達」的關鍵就在它的天線是一種經過特殊設計的天線,叫做「單脈沖天線」(monopulse antenna)。
「單脈沖天線」如圖09所示,工程師用通過正中心的水平線(azimuth line)與高低線(elevation line)把天線分成4塊。從右上方那一塊算起,逆時針方向去數,定義為I、II、III、IV等四塊,就像我們中學的時候學習解析幾何時平面座標的4個「像限」(quadrants)。
單脈沖雷達在運作時不是只計算整個天線蒐集到的功率,而是把每一個「像限」分別蒐集並計算它的功率。
B. 追蹤誤差的計算
當我們要估計水平方向的誤差時,我們就把左邊上下那兩塊的功率加起來,再把右邊上下那兩塊的功率也加起來,然後用右邊那一半(正方向)減左邊那一塊(負方向),就得到上圖希臘字母大寫的 delta(對不起,YST 的中文軟體沒有希臘字母)。也就是說
希臘字母大寫的 delta = (I + IV) - (II + III)
希臘字母大寫的 sigma = I + II + III + IV
註:
希臘字母大寫的 delta 像一個三角形符號,數學符號中常用它代表差;
希臘字母大寫的 sigma 像一個逆時鐘轉90度的M,數學符號中常用它代表和。
這個 delta 函數畫成圖形就如圖09告訴第二幅所示。你看:
如果 delta > 0,那就表示目標在右邊正的一方,於是天線就要往右修正一點點;
如果 delta < 0,那就表示目標在左邊負的一方,於是天線就要往左修正一點點;
如果 delta = 0,那就表示目標在正中,天線不必修正。
好,我們已經知道天線要朝那個方向修正了,但是修正多少呢?
回答:我們只要把 delta 除以整個天線蒐集的功率總量 sigma 就可以得到修正量 OBA,OBA 是 Off Boresight Angle 的縮寫,意思就是從正前方偏移的角度。
OBA = K.delta / sigma 度
,此處 K 是這段直線的斜率,天線工程師可以由實驗來決定,它的圖形畫在圖09的最下面。
上面的圖形用一架被追蹤的飛機做例子,它明顯出現在天線的左半部,所以左半部蒐集得到的功率(II + III)大於右半部蒐集得到的功率(I + IV)。
因此,delta = 右半部功率 - 左半部功率 < 0,於是它告訴我們:
1. 目標在天線的左半部(負方向),天線需要向左修正;
2. 修正量是 K.delta / sigma 度。
C. 追蹤誤差的修正
在實際執行精確跟蹤的時候天線不會轉動 OBA,這很有可能會修正過量(over shoot)導致天線來回震動。
通常的情形是天線只轉動一部分
C.OBA
,此處 C 是天線工程師決定的常數,介於0與1之間,譬如0.5。由於雷達的追蹤週期非常短,通常每秒鐘進行至少10次以上,高的情形可以達到每秒50次,所以 OBA很快就接近0了。
譬如 C = 0.5,經過10次修正以後誤差已經小於原來的千分之一,所須時間還不到1秒鐘。
以上所說是水平方向的計算與修正,高低方向也是一樣,唯一的不同就是用上半部的功率和(正方向)減下半部的功率和(負方向),也就是
希臘字母大寫的 delta = (I + II)- (III + IV)。
丙. 雷達追蹤的角誤差
我們在這一節簡單扼要地介紹了雷達操作的三個最基本的模式:
1. 搜尋與發現;
2. 邊搜尋邊追蹤;
3. 單目標追蹤。
我們更進一步對目標角度的測量作了比較深入的論述,利用「單脈沖天線」(monopulse antenna)對目標做出角度修正是雷達應用中最基本和最重要的技巧。
現在讓我們為這一節的論述作一個簡單的結論:
1. 雷達的目標定位是根據目標測定的角度與距離來決定,前者遠比後者重要。
2. 角度追蹤(angle track)是所有雷達追蹤項目中最基本、最重要、也是必不可少的,遠比距離追蹤(range track)來得重要,這是因為在很多應用中單憑「角度追蹤」(angle track)就足夠完成任務,譬如空對空導彈。
3. 「單目標追蹤」(STT)的角度誤差非常小,火控雷達的單目標角度追蹤誤差可以小到低於兩百分之一度,這個精確度跟波束寬應該沒有什麼關係。
4. 「邊搜尋邊追蹤」(TWS)的角度誤差要比「單目標追蹤」(STT)大一些,但是無論如何也遠小於雷達波束的寬度。
(未完待續)
虎年談天下大勢:彈道導彈攻擊大型海面船隻(VI)
清晨獨自慢跑的 YST
本文於 修改第 8 次